Las noticias sobre los robots humanoides no cesan en España. Desde el robot Optimus de Tesla que ya trabaja en sus fábricas hasta el robot humanoide que prepara comida y limpia la cocina; ejemplos no faltan. Sin embargo, nadie había probado a poner a uno de estos robots al volante, hasta el momento. Un grupo de investigadores de la Universidad de Tokio han desarrollado un robot y lo han puesto a conducir en una pista.
Pese a que pueda parecer gracioso por fuera, esto es un proyecto serio. De hecho, la investigación se ha publicado en la forma de un artículo técnico en la Cornell University de Nueva York; incluso uno de los miembros que lo firman es consultor directo de Toyota. El robot apodado Mushashi ha aparecido en un espectacular vídeo conduciendo un pequeño coche eléctrico de pruebas.
Mushashi se cataloga como un humanoide musculoesquelético, que ha sido desarrollado por el propio grupo de investigación desde el año 2019. Sirve como banco de pruebas para el desarrollo de aprendizaje en sistemas de conducción. Los investigadores detallan cómo Mushashi presenta una estructura articular y muscular similar al del cuerpo humano, e incluso tiene 'ojos' para poder 'ver'.
Un robot humanoide conduciendo
Así lo expone el medio TechCrunch, que resalta cómo el robot disfruta de una construcción que intenta asemejarse lo máximo posible al de un humano convencional. El robot en cuestión está siendo entrenado por miembros del Laboratorio Kougaku del Sistema Jouhou para conseguir avances en un proyecto de conducción autónoma, con la esperanza de que Mushashi pueda conducir como un humano.
Al menos, esa es la teoría. La práctica es más complicada; en el detallado vídeo de 3 minutos, Mushashi consigue resultados mixtos, que en algunos casos son bastante positivos, y en otros todo lo contrario. Los investigadores también hablan de los beneficios de la propia estructura de Mushashi, que le permite desde manejar el mismo volante del coche hasta reconocer humanos en los espejos retrovisores.
Mushashi está muy lejos de ser un muñeco de pruebas al uso. En la cabeza el robot integra un sistema de visión con cámaras de alta resolución ubicadas en lo que serían los 'ojos' del robot. La misma cabeza puede girar, inclinarse y rotar para ver los espejos o reaccionar. Sus manos tienen cinco dedos capaces de girar el volante (sin agarrarlo, ojo) haciendo uso de un software de aprendizaje y los datos recogidos por los distintos sensores del robot.
El dispositivo es tremendamente completo. El vídeo muestra a Mushashi girando la llave del contacto, poniendo el freno de mano, encendiendo el coche, y presionar tanto los pedales del freno y del acelerador. En una sección del mismo, se habla de cómo Mushashi puede operar "gradualmente" el volante simplemente con este sistema de aprendizaje. Todas las pruebas se realizaron en la misma Universidad de Tokio.
Obviamente, el vehículo también ha sido objeto de modificaciones para intentar que el experimento sea lo más factible posible. El robot japonés usa un microcoche eléctrico de una única plaza, conocido como COMS que tiene 12 años de antigüedad. Los investigadores equiparon al COMS con un mini PC Intel Nuc que ejecutase el módulo de reconocimiento de Mushashi y un router para transmitir conectividad vía WiFi. Son básicamente los elementos principales que habilitan el funcionamiento del robot.
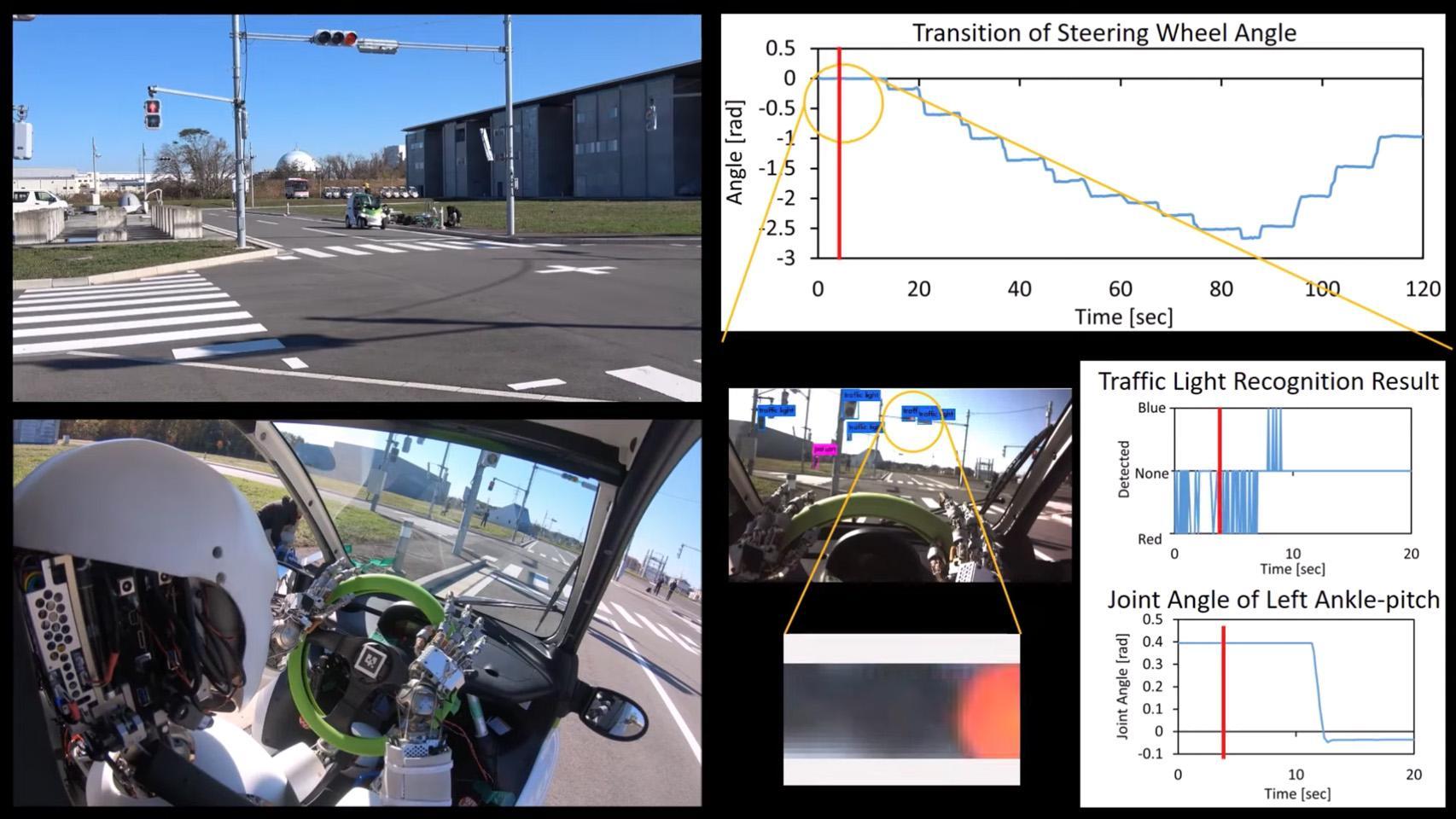
Si bien puede parecer que Mushashi controla el coche de una forma un tanto tosca, los resultados son buenos en los aspectos clave. Por ejemplo, los investigadores se ponen frente al coche (siempre a una velocidad prudencial) y dirigen el vehículo a semáforos. En todos estos casos, el robot siguió las normas elementales de seguridad; no atropelló a sus creadores y respondió correctamente a los semáforos.
'Ojos' del robot Mushashi.
Desgraciadamente, los miembros del equipo de investigación se toparon con problemas, y no pequeños precisamente. El robot tuvo serios problemas a la hora de mantener la velocidad en las pendientes, haciendo que fuera difícil que Mushashi pudiera avanzar por cuestas correctamente. La respuesta a esto es sencilla; el software de Mushashi aún no estaba preparado para este tipo de trayecto.
Por otro lado está un acto que para los humanos es sencillísimo y que a Mushashi le llevó mucho: doblar una esquina. No se muestra específicamente en el vídeo, pero los ingenieros admitieron que este simple giro llevó hasta dos minutos de duración. En vez de pisar el acelerador, el robot levantaba su pie robótico del freno.
Esta es solo la punta de lanza de una idea mucho más grande, que implicará desarrollar un nuevo robot (con la tecnología ya integrada en su propio cuerpo) y que integre un software mejorado que lime estas asperezas. Sin embargo, es imposible determinar cuánto tiempo pasará hasta que esto se materialice, por lo que podrían pasar años hasta ver un nuevo y potencial Mushashi 2.0.