
España está completamente abocada a abrazar la robótica en los hogares del futuro. Las empresas de la Big Tech internacional han desarrollado robots humanoides capaces de preparar la comida y limpiar la cocina, así como realizar las tareas de la casa que van desde lavar la ropa hasta cuidar de los niños. Expertos de la Universidad Técnica de Viena han desarrollado un revolucionario brazo robot capaz de limpiar fregaderos.
Sí, es cierto que no suena a algo impresionante, especialmente después de que robots como Atlas de Boston Dynamics hayan demostrado su potencial de muchas maneras distintas. Pero lo que muchos no llegan a razonar es que hay tipos concretos de tareas que son muy difíciles de automatizar, debido a la naturaleza intrínseca de ellas. Recordemos que la forma curvilínea de un lavabo puede ser todo un reto para un robot.
Las variables que un robot debe considerar a la hora de limpiar un lavabo o un elemento similar son muy complicadas; aplicar la fuerza necesaria para limpiar según qué huecos, reajustar la posición para alcanzar todos los huecos, etcétera. El brazo robot desarrollado por la Universidad Técnica de Viena puede dejar como los chorros del oro un lavabo normal con tan solo observar el procedimiento, mediante aprendizaje automático.
Limpiar con tan solo mirar
Así lo recoge la revista alemana TU Wien, que expone el trabajo de la entidad de investigación. La clave de la dificultad que encierra para un robot limpiar un fregadero la explica Andreas Kugi, del Instituto de Automatización y Control de la Universidad Técnica de Viena. La clave está en su forma, que dificulta enormemente la tarea del robot a la hora de moverse.
En palabras de Kugi, la idea de capturar la forma geométrica de un lavabo mediante cámaras es algo fácil. "Pero ese no es el paso decisivo. Es mucho más difícil enseñarle al robot qué tipo de movimiento se requiere para cada parte de la superficie, a qué velocidad moverse, cuál es en ángulo adecuado, cuál es la cantidad adecuada". Los humanos, sencillamente, tenemos 'de serie' la capacidad para poder aprender e imitar los movimientos de otra persona y así realizar nuestra tarea mejor.
Demostración del robot de la Universidad Técnica de Viena.
Este es el enfoque aplicado por Kugi y su equipo: que el robot pudiera aprender como lo haría una persona normal, mirando. Algo muy habitual; una persona hace una tarea, y le enseña a otra cómo se hace mientras esta mira. En vez de pasar por el difícil proceso de enseñar al robot los detalles más complicados para que este pueda limpiar el lavabo, el equipo genera grandes conjuntos de datos para que el robot aprenda de ellos.
El secreto está en la esponja usada por el robot, que está repleta de sensores de fuerza y marcadores de seguimiento, que recoge todos los datos necesarios para el aprendizaje del robot. Christian Hartl-Nesic, jefe del grupo de Robótica Industrial bajo el mando de Kugi, relata que a "partir de unas pocas demostraciones, generamos una gran cantidad de datos que luego se procesan para que el robot aprenda lo que significa una limpieza correcta".
Robot limpiando el fregadero.
La esponja es solo un elemento de este revolucionario proceso. El equipo de investigación de la Universidad Técnica ha podido desarrollar un sistema de procesamiento de datos, que combina varias técnicas englobadas dentro del aprendizaje automático para favorecer dicho aprendizaje. Los datos de medición recogidos con la esponja se procesan estadísticamente, y una red neuronal se entrena con los resultados.
La red neuronal en cuestión que se entrena mediante esta estrategia de procesamiento de datos aprende los llamados "primitivos de movimiento" o elementos de movimiento predefinidos, que determinan el proceso de limpieza. Es esta red a que controla el brazo robótico que finalmente acaba por limpiar satisfactoriamente el lavabo, pese a haber enseñado una cantidad de datos relativamente escasa al robot.
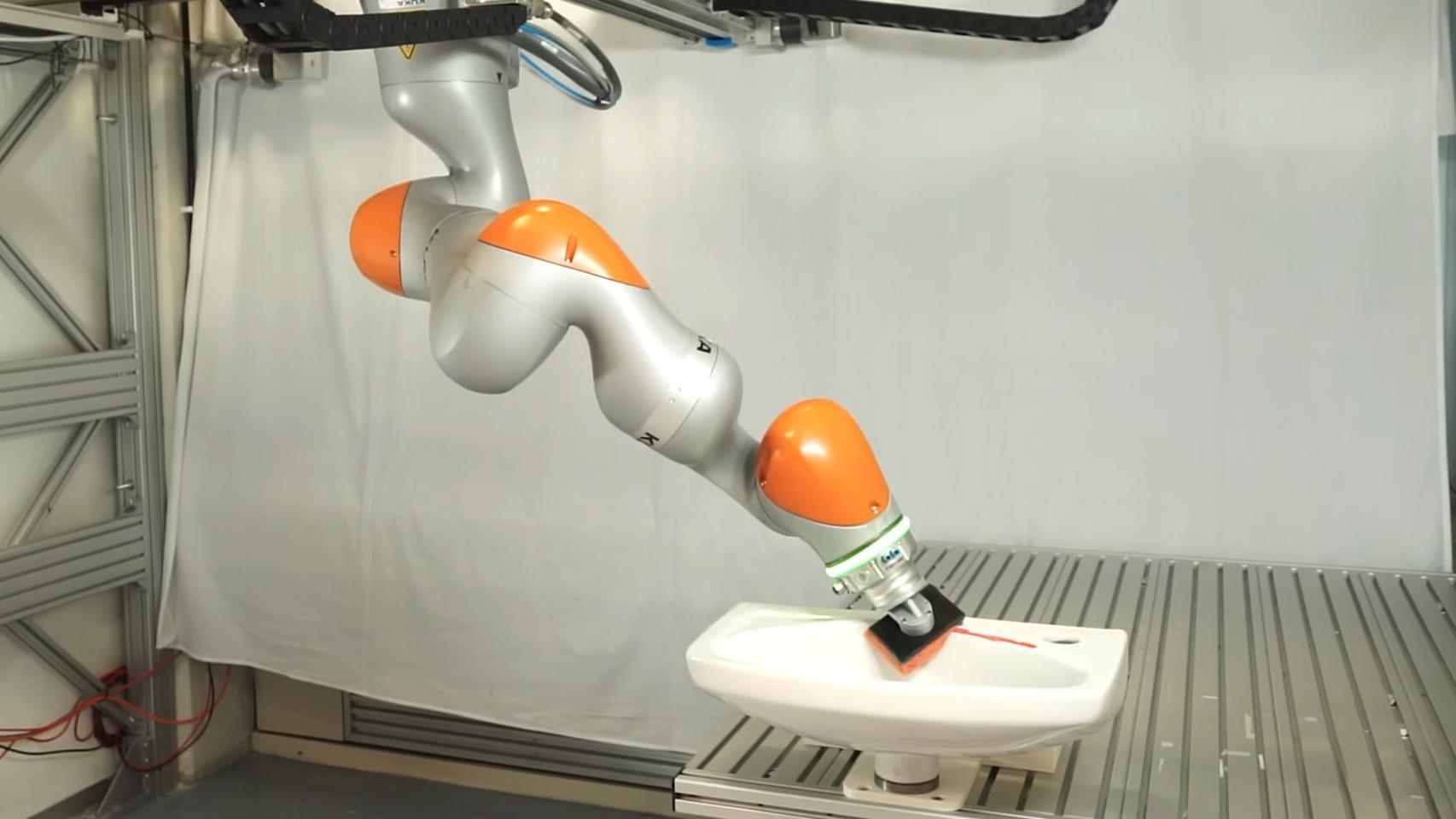
Para muestra, un botón. En un momento dado, los especialistas realizaron una serie de demostraciones ubicadas únicamente en el borde delantero del propio fregadero, más que suficientes para generar los datos a procesar posteriormente. Para ello, usaron un gel teñido que hacía las veces de suciedad. La idea era que la red neuronal pudiera transformar la información recibida en patrones de movimiento definidos, útiles para limpiar el lavabo.
Incluso centrándose sólo en el borde del fregadero, el algoritmo de la red neuronal permitió a la máquina limpiar tanto el fregadero como otros objetos con superficies complicadas para el entrenamiento. Los investigadores diseñaron el experimento para que el robot arrojara resultados mientras este limpiaba el fregadero. Todo salió a pedir de boca para los investigadores.
Brazo robot en la demostración.
Es decir, que con unas pocas demostraciones y centrándose en una sola área del elemento a limpiar, el algoritmo pudo aprender mediante este sistema de procesamiento de datos a limpiar la totalidad del fregadero. No solo eso; los resultados prueban que esta clase de brazos robots puede llevar a cabo distintos tipos de tareas en superficies diferentes, como pintar, lijar, etcétera.
Kugi llega a imaginar un entorno con robots adquiriendo experiencia de forma individual con datos locales. "Aún así, todos los robots podrían compartir entre sí los parámetros que han aprendido", llega a afirmar. Si se ubicaran varios de estos robots autodidactas en talleres locales, se abriría la veda a que estos robots pudieran adquirir experiencia de forma individual, en un procedimiento apodado como "aprendizaje federado".
Un estudiante de doctorado perteneciente al Industrial Robotics Group explica lo valiosos que son estos resultados. "El robot aprende que hay que sujetar la esponja de forma diferente según la forma de la superficie, y que hay que aplicar una fuerza diferente en una zona muy curva que en una superficie plana". El trabajo, titulado "Primitivas probabilísticas de interacción de superficies para el aprendizaje de la limpieza robótica de bordes", está disponible en este enlace.