dronautonomo2
Drones autónomos capaces de reconocer el entorno en tiempo real
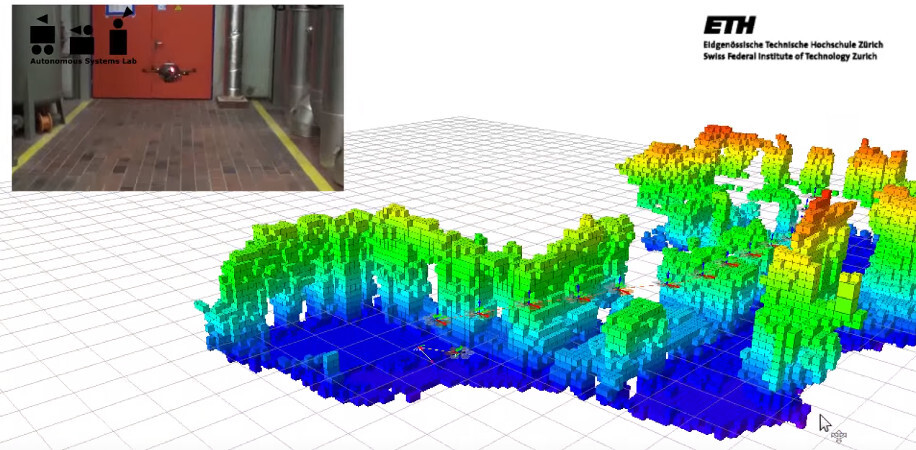
Este pequeño dron autónomo es capaz de reconocer el espacio en el que vuela evitando obstáculos.
28 octubre, 2015 10:31Noticias relacionadas
- India lanza la misión que le puede convertir en el cuarto país en llegar a la Luna
- Airbus presenta un avión con las alas de un ave de presa, ¿el futuro de la aviación?
- Tu nuevo fondo de pantalla ha sido posible gracias a una vela solar
- Duro como una piedra o blando como la gelatina: este material dinámico cambia con la iluminación
Este pequeño dron autónomo es capaz de reconocer el espacio en el que vuela evitando obstáculos.
Investigadores de el Federal Institute of Technology de Zurich están trabajando para traer drones más independientes. Han mostrado un dron que tiene la capacidad de construir su propio mapa 3D de un lugar desconocido con una ayuda mínima (por ahora) de un piloto humano.
Los drones voladores comerciales cada vez se utilizan más en tareas que requieren un acceso inmediato, pero se necesita de un piloto especializado y este debe conocer el lugar en el que desarrollar la tarea. Algo que puede empezar a cambiar gracias a este sistema que en un futuro podría montar cualquier dron.
Sensores de mapeo hacen a un dron autónomo
dronautonomo1
“Esta es la primera vez que podemos mapear un lugar completo, situar al dron en ese mapa y planear la ruta durante el vuelo” asegura Michael Burri, responsable en parte del proyecto. Hasta ahora se necesitaba la carga previa de mapas, pero con estos sensores, el dron solo necesita un vuelo dirigido de ida para mapear el lugar por sí mismo y navegar de forma autónoma tantas veces como se requiera.
Con un tiempo de vuelo de 7 minutos, debido al peso de los sensores integrados, Burri confía en que con el tiempo conseguirán reducir el volumen del sistema para conseguir mayor rendimiento. El grupo suizo sigue trabajando en darle al dron la capacidad de evadir obstáculos en movimiento que no aparecen en la mapeo inicial, como personas o maquinaria que pueda estar operando en el lugar.
Vía | MIT Technology Review