Un robot ciego es capaz de subir escaleras, correr y saltar como si fuera nada. ¿Quién dijo que sólo había una manera de ver el mundo?
A estas alturas ya es normal ver robots realizando todo tipo de acciones que hasta hace apenas unos años eran imposibles para ellos; desde andar con dos piernas sin importar el terreno, a dar saltos, balancearse, o incluso realizar acrobacias más propias de una película de acción.
Pero todos estos robots tenían grandes ventajas, sobre todo respecto a los seres humanos. Para saber por dónde iban, no dependían sólo de cámaras, sino de varios sensores; cuanta más información recibiesen, mejor trabajo harían. Sin embargo, eso plantea la duda de lo que serían capaces sin todos esos sensores.
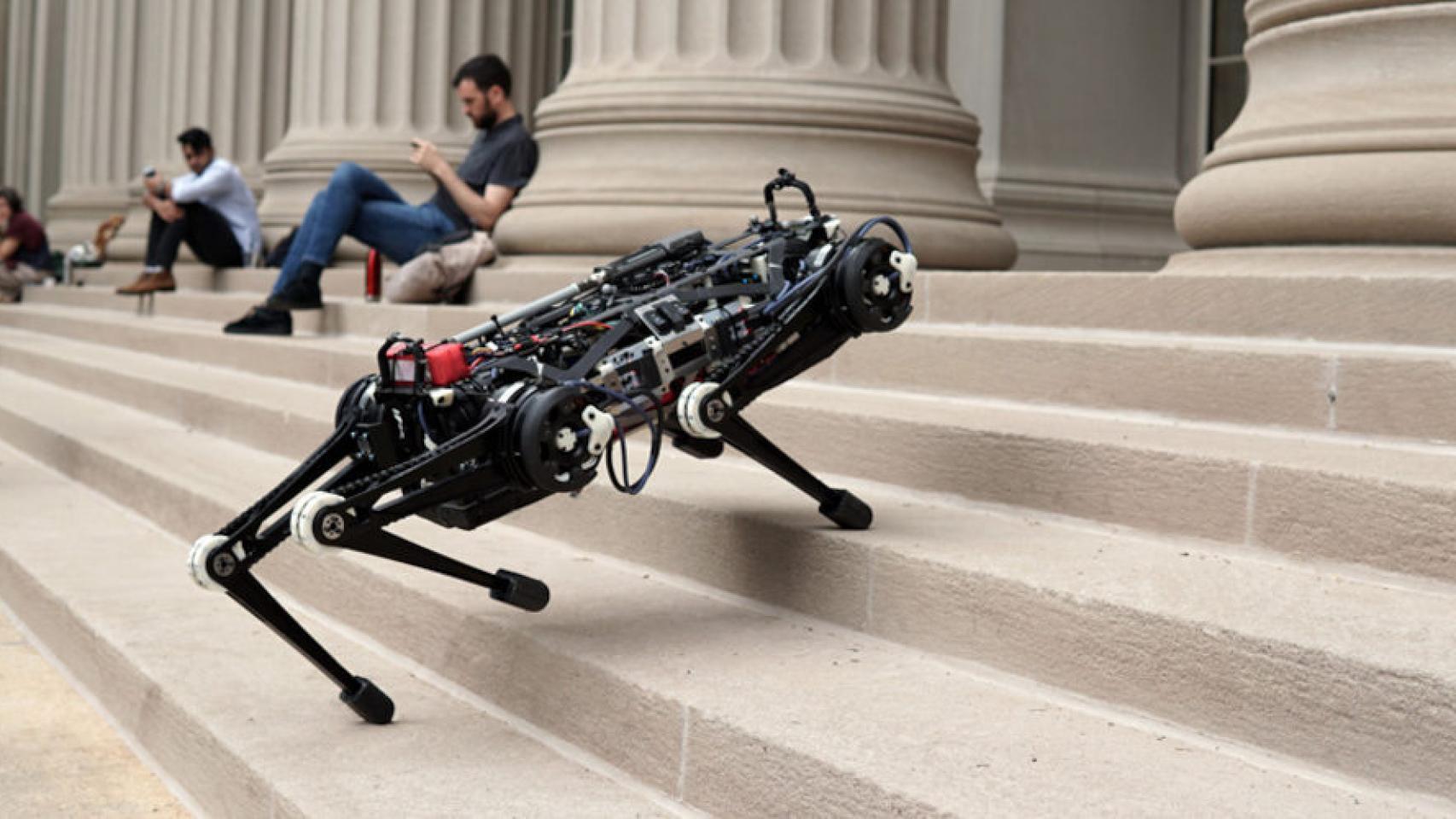
Investigadores del MIT tuvieron esa misma idea, y decidieron ponerla en práctica con su robot Cheetah 3; la última versión del “robot guepardo” que tanto miedo nos dio en su momento, ahora estaba “ciego”, y tendría que navegar por el mundo sin la ayuda adicional.
Cómo funciona el robot ciego capaz de subir escaleras
Pero, ¿cómo moverse sin la visión de las cámaras ni la ayuda de los sensores? La clave estaba en dos nuevos algoritmos; desarrollados para tomar decisiones cada vez que el robot se encontrase con un obstáculo. Cada vez que el robot da un paso, obtiene información de los receptores táctiles de las patas y ejecuta los algoritmos.
El primer algoritmo es el de dirección, y se activa cuando el robot encuentra el obstáculo y no puede continuar; entonces debe decidir la siguiente dirección. Si debe dar un paso de todas formas, o si le vendría mejor dar marchas atrás, o buscar otro camino.
El segundo algoritmo es el de fuerza, y controla la manera con la que debe realizar las acciones decididas por el primer algoritmo. Teniendo en cuenta que el robot pesa 40 kg y es el tamaño de un perro labrador, esta no es una decisión que se pueda tomar a la ligera, ya que puede terminar en el suelo.
La conjunción de estos algoritmos le permite superar obstáculos con sorprendente faciliad. Es capaz incluso de subir escaleras, pese a que no es capaz de “verlas”. Sólo con “sentir” por dónde va, puede hacerse una idea de por dónde ir.
Este sistema sería muy útil para enviar a robots a realizar tareas imposibles o muy peligrosas para los humanos. Por ejemplo, en situaciones en las que una cámara y unos sensores no serían de gran ayuda, el robot no se quedaría quieto esperando a que lo salven; sería capaz de continuar la misión, como por ejemplo, de rescate.
Noticias relacionadas
- Estos robots microscópicos son tan diminutos que se mueven a base de vibraciones
- Tomar curvas peligrosas con la moto será menos peligroso con esta IA avisándonos
- El cofundador de Siri se une al equipo de Sherpa, el asistente inteligente español
- Intel crea un "cerebro" digital con 8 millones de neuronas, imitando a los nuestros