Robots que autoensamblan Omicrono
Estos robots se ensamblan solos como piezas de Lego: serán cruciales para la exploración espacial
El futuro está en robots adaptables al entorno, capaces de transformarse, replicarse y crear diferentes formas según la necesidad del momento.
28 mayo, 2022 01:23Noticias relacionadas
En la exploración espacial los astronautas muchas veces no saben lo que van a encontrarse o necesitar tan lejos de casa. De ahí que muchos proyectos busquen desarrollar tecnologías de construcción e impresión, para poder fabricar en otros planetas lo que haga falta. En esta visión futurista también se incluyen los robots con formas cambiantes, como algunos diseñados en España, o algunos pensados para transformarse en múltiples objetos. Es el futuro de los robots autoensambables.
Algunos recordarán a los Transformers, mientras otros habrán pensado inmediatamente en los diminutos blocs de la película Big Hero 6 de Pixar. Sí, el mundo del entretenimiento lleva décadas imaginando un mundo en el que los robots no sean máquinas limitadas a una o varias acciones. La realidad dista mucho de alcanzar a la ficción, pero va bien encaminada.
Ingenieros del MIT (Instituto de Tecnología de Massachuset) trabajan en la creación de lo que han bautizado como ElectroVoxels, cubos robóticos que se unen de forma semiautónoma para crear objetos más grandes y que servirían como herramientas moldeables en el espacio. Una propuesta interesante que solo refleja el principio de una larga carrera, que debería terminar con robots capaces de autoevolucionar por sí mismos y adaptarse al entorno, tal y como ha adelantado la Dra. Emma Hart de la Universidad Napier de Edimburgo en una reciente charla TedTalk.
ElectroVoxels
Se llaman ElectroVoxels en referencia a los vóxeles, que son píxeles volumétricos. Estos cubos se unen unos a otros hasta conformar la forma de una mesa o una pieza necesaria para una nave espacial. Mediante un programa informático, los ingenieros configuran la composición de esos patrones, que después los electrovoxels deben representar de forma independiente.
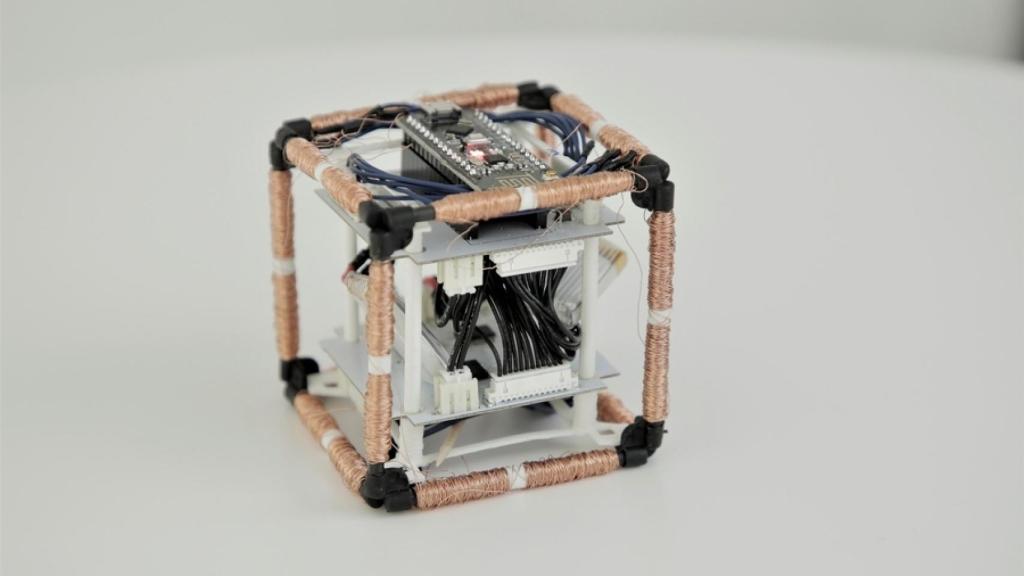
Los prototipos actuales miden seis centímetros de largo, ancho y alto con electroimanes en cada uno de sus 12 bordes para "abrazarse" a sus hermanos, de ahí el inicio de su nombre. Los imanes se componen de un núcleo de ferrita envueltos en alambre de cobre. El coste total sería de solo 60 centavos, explican desde el MIT para demostrar que la fabricación no es cara.
Robots que se autoensamblan
Gracias a un microcontrolador y circuitos integrados se puede dirigir la corriente por los electroimanes y provocar que el de al lado se acerque o se aleje. A diferencia de las bisagras tradicionales que requieren conexiones mecánicas entre dos elementos, los ElectroVoxels son completamente inalámbricos, lo que facilita mucho su mantenimiento y fabricación para un sistema a gran escala.
No deben ser réplicas exactas unos de otros, en realidad, salvo por la forma y ciertos elementos comunes. Los robots pueden contar con diferentes funciones, como las piezas de Lego, que no son todas idénticas ni sirven para lo mismo. Un microbot podrá incluir una herramienta, otros portarán baterías y algunos motores, para dotar de vida a la estructura final.

ElectroVoxels Omicrono
Es cierto que actualmente los cubos son de buen tamaño, como se puede ver en el vídeo, por lo que aquellas estructuras que acaben formando serán toscas. Con el tiempo, uno de los objetivos del proyecto es reducir el tamaño de cada microbot a la mínima expresión.
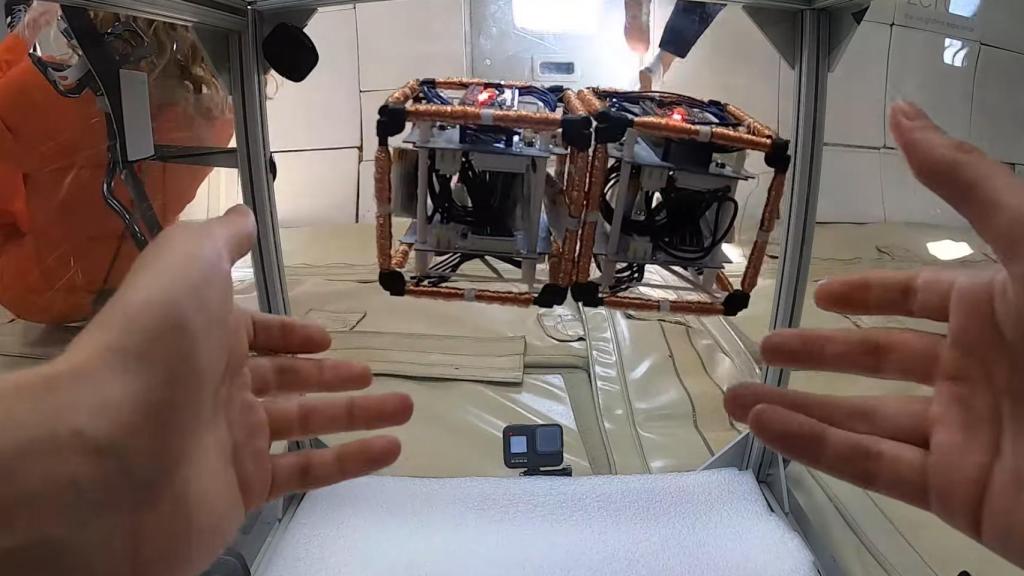
Estos pequeños cubos se han puesto a prueba en el famoso "cometa vómito", el avión de la NASA donde los investigadores ponen a prueba sus proyectos sin gravedad. Con esa libertad que aporta la falta de gravedad, se reduce la dependencia al combustible y así, abordar desafíos relacionados con la masa y el volumen de lanzamiento.
Montando nuevas piezas
Lejos todavía del control mental que realizaban los protagonistas de Big Hero 6 de los nanobots, los científicos del MIT han desarrollado un software para visualizar las reconfiguraciones de los electrovoxels y calcular los parámetros en su movimiento. A través de este programa se pueden manipular hasta mil cubos con solo unos clics e incluso usar scripts predefinidos para codificar múltiples rotaciones.
Electrovoxels Omicrono
El sistema realmente permite que el usuario controle el destino de los bloques, dentro de lo razonable: puede cambiar la velocidad, resaltar los imanes y mostrar los movimientos necesarios para evitar colisiones. Para hacer que los bloques se muevan, tiene que seguir una secuencia, como sucedía en el famoso juego de Tetris.
La secuencia se realiza en tres pasos, cada uno ejecutado por un cubo diferente: lanzamiento, viaje y captura. Un cubo ejerce de origen y lanza al segundo, el que viaja, hasta el tercero que lo captura. Los usuarios del software pueden especificar qué cubo gira en qué dirección, y el algoritmo calculará automáticamente la secuencia y la dirección de las asignaciones electromagnéticas requeridas para que eso suceda (repeler, atraer o apagar).
Electrovoxels Omicrono
"Esta investigación demuestra cómo los cubos pivotantes accionados electromagnéticamente son fáciles de construir, operar y mantener, lo que permite un sistema flexible, modular y reconfigurable que puede servir como inspiración para diseñar componentes inteligentes de futuras misiones de exploración", explica Dario Izzo, jefe del Equipo de Conceptos Avanzados en el Espacio Europeo en el comunicado del MIT.
Robot autoevolutivos
El proyecto avanza, pero es una tecnología que aún está en pañales para lo que se espera de ella. Uno de los grandes desafíos que presentan los robots reconfigurables es que si se desea que cada uno de estos pequeños módulos se pueda mover por sí mismo, "debe incorporar computación, sensores electrónicos, actuadores en cada módulo, y eso es realmente difícil de hacer a medida que los módulos se vuelven cada vez más pequeños”, explica Martin Nisser, estudiante de doctorado en el MIT en un pódcast.
En un peldaño más arriba de lo que estos robots reconfigurables suponen para la industria está la idea de los futuros robots autoevolutivos. Una tecnología en la que el diseño y fabricación de nuevos robots se conviertan en una tarea para las máquinas en lugar de los humanos. Así, si la máquina se topa con un obstáculo, puede evolucionar o rediseñarse in situ para solventar esa barrera y seguir con su misión. Quizás algún día sean los propios ElectroVoxels los que decidan qué formas adoptar.
La Dra. Emma Hart en su ponencia pone de ejemplo unas plantas que han evolucionado hasta crear hojas como antenas parabólicas que atraen a los murciélagos para favorecer la polinización de sus semillas. "¿Qué pasaría si pudiéramos crear una versión artificial de la evolución que permitiera a los robots evolucionar de manera similar a los organismos biológicos?", reflexiona sobre esta tecnología todavía más cercana a la ciencia ficción que a la robótica actual.