
robot-pierna-port
Un robot capaz de levantarse y seguir andando después de dañarse una pierna
Noticias relacionadas
Uno de los problemas mas frecuentes de los robots es que si se salen del guión establecido son incapaces de recuperarse. Puede que un robot sea capaz de andar tan bien como un ser humano, pero en cuanto falle un paso se caerá irremediablemente y no volverá a levantarse sin ayuda humana; y lo peor es que no estamos viendo grandes avances al respecto, ya que parece mas importante mostrar cómo funciona el robot en situaciones ideales para conseguir fondos. Un equipo de la Universidad de Paris-Sorbonne ha decidido encargarse de este problema, y lo ha hecho con un robot que es capaz de adaptarse y continuar avanzando incluso cuando se rompe una pata.
Perder una pierna no lo para
Esto, que puede parecer bastante simple, es increíblemente complejo porque una vez que el robot pierde uno de sus puntos de apoyo tiene que tirar a la basura todo lo que “sabe” sobre el proceso de andar y empezar de nuevo; básicamente tiene que aprender a caminar cada vez que sufre un cambio semejante. La cantidad de parámetros a cambiar es enorme, desde el ángulo de las piernas, la velocidad y la aceleración a la que se mueven, la cantidad de fuerza aplicada en cada paso… Si el robot tuviese que revisar todos esos parámetros y cambiarlos uno por uno hasta encontrar la combinación correcta pasaría demasiado tiempo, un tiempo valioso si estamos hablando de un robot dedicado a tareas de rescate que se ha dañado en el proceso, por ejemplo.
robot-pierna-2
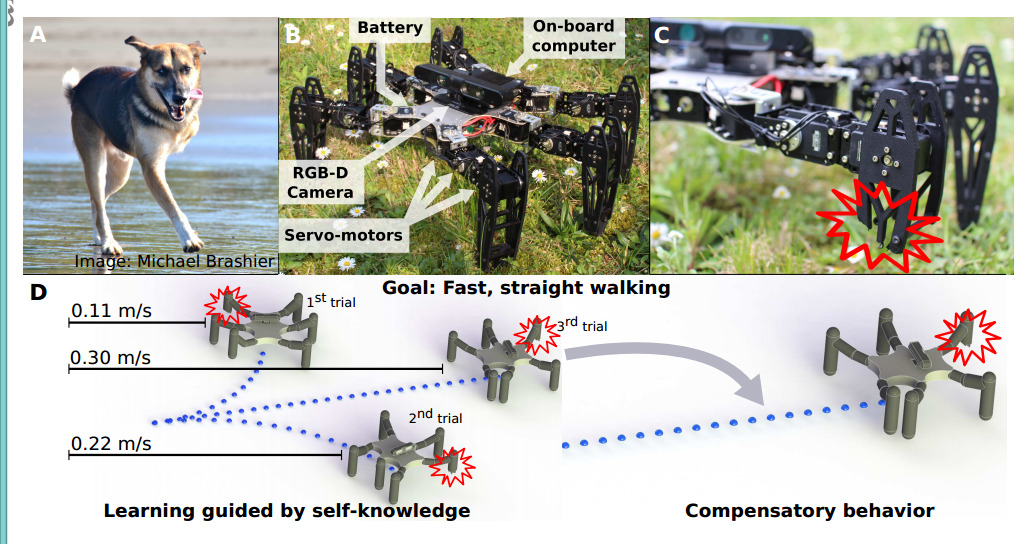
El método ideado por los investigadores en vez de eso se centra en limitar la cantidad de opciones disponibles para el robot; está claro que dependiendo del caso mover la pierna mas de un ángulo concreto es contraproducente y nunca dará resultados. En vez de dejar que el robot llegue a esa conclusión por él solo, se le carga una base de datos con 13.000 posibilidades diferentes, que irá descartando conforme vaya comprobando los datos de la situación hasta encontrar el conjunto de movimientos correcto, basándose en la cantidad de tiempo que cada pierna está en el suelo.

robot-pierna-1
Por ejemplo, si detecta que una pierna está dañada, el robot descartará todos los conjuntos de movimiento que minimicen el uso de esa pierna concreta y calculará la velocidad a la que es capaz de ir; con esa información puede tomar la decisión de probar otro conjunto mas apropiado a la situación. De esta manera en unas pocas pruebas es capaz de alcanzar la forma de andar correcta, apenas unos segundos después de perder el uso de una pierna. Este avance no solo será importante para crear robots de los que dependa nuestra vida, como asistentes personales o robots de rescate, sino que los investigadores creen que también puede servir para entender mejor cómo los animales heridos hacen lo mismo cuando son heridos.
Fuente | Medium





