La robótica tiende a imitar las propiedades físicas de los seres humanos, desde realizar gestos con la cara, hasta caminar y manipular objetos con las manos. Aunque algunas particularidades de la anatomía humana se le resisten más, los investigadores todavía tratan de diseñar manos robóticas que sean suaves al tacto y no hagan daño al tratar con personas u objetos delicados
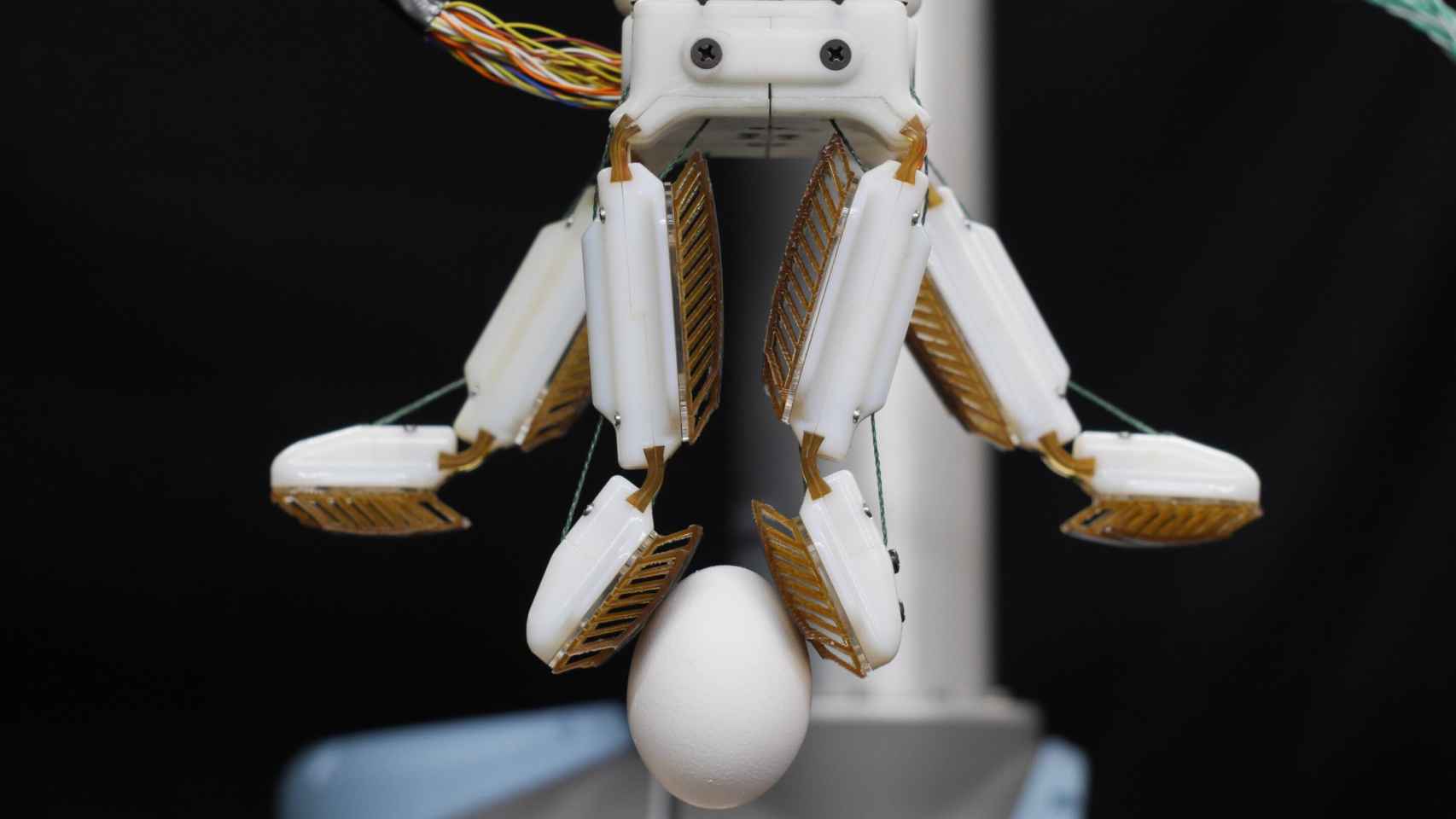
La Universidad de Stanford ha propuesto una nueva mano robótica, similar a las de los humanos, pero inspirada en un curioso animal de sangre fría para poder manipular objetos sin tener que ejercer mucha fuerza. FarmHard puede sujetar un huevo con un simple pellizco y no romperlo.
Un artículo en la revista Science Robotics desvela como las pequeñas patitas de los lagartos gecko han inspirado la palma y yemas de esta mano artificial. Las ventosas que permiten trepar por múltiples superficies a este reptil se han replicado con adhesivos y nervios de goma flexibles en FarmHard.
Sutiles pellizcos
La mano FarmHard se inspira en dos extremidades del mundo natural, la mano de los humanos con las falanges de los dedos alargadas y capaces de articularse, y en segundo lugar las patas de los gecko que se asemejan a las ventosas y les permiten trepar con facilidad. Así el robot tiene cuatro dedos articulados con yemas construidas con adhesivos.
Cuando están en contacto con alguna superficie, las aletas que forman las yemas y palma de este robot crean una fuerza de Van der Waals, un tipo de fuerza intermolecular débil para agarrar el objeto sin ejercer mucha presión. El conjunto de nervios se pliegan al aplicar fuerza y garantizan que la presión se uniforme sobre las almohadillas adhesivas, evitando así que el objeto resbale al sostenerlo en el aire.
FarmHard, mano robótica
Con una flexibilidad que poco tiene que ver con las manos humanas, los cuatro dedos robóticos se abren para después cerrarse y abrazar con suavidad una pelota, una botella o un huevo. El vídeo muestra como los objetos fuertes, pesado o delicados, son elevados con delicadeza por la mano. Otra de las ventajas de este sistema es que no es necesario recurrir a sustancias pegajosas o que dejen residuos en el objeto que se intenta manipular.
Además del diseño de la parte interna de la mano, hay otros elementos que hacen posible esa sutileza a la hora de manipular fruta, por ejemplo. Los tendones de la mano permiten realizar un movimiento amplio y pellizcar con la punta de los dedos sin hacer un gesto forzado como ocurre en otros robots.
La impresión 3D clave
Los investigadores se encontraron con dificultades para diseñar el mecanismo pues las simulaciones virtuales que se suelen realizar previamente por ordenador no comprenden del todo el rendimiento de objetos blandos en el mundo real. Esta complicación se compensó imprimiendo varios modelos en 3D y así poner a prueba los materiales.
FarmHard, mano robótica
"Las primeras aplicaciones de los adhesivos gecko tuvieron que ver con robots trepadores, trepando personas o agarrando objetos muy grandes y muy suaves en el espacio. Pero siempre hemos tenido en mente usarlos para aplicaciones más prácticas" explica a TechExplore Mark Cutkosky, profesor Fletcher Jones en la Escuela de Ingeniería de Stanford y principal autor del estudio.
También te puede interesar...
- El último avance militar ruso es una piedra robot: camuflaje para vigilar y grabar a los enemigos
- Cobi, el primer robot capaz de poner vacunas de forma autónoma, indolora y sin agujas
- Los humanos trabajamos mejor cuando un robot nos insulta