
OceanOneK en una prueba en la piscina de Stanford Omicrono
OceanOneK, el futurista robot humanoide para cazar tesoros a un kilómetro bajo el mar
Diseñado por investigadores de Stanford, el robot incorpora innovaciones en materia de háptica, robótica submarina e inteligencia artificial.

La humanidad sigue buscando las respuestas a las preguntas más difíciles en el espacio, ya sea a través de misiones tripuladas o de rovers como Perseverance, que busca señales de vida orgánica en la superficie de Marte. Sin embargo, el fondo marino, del que solo conocemos el 5 por ciento, sigue plagado de misterios y reliquias hundidas, en gran medida por la dificultad que supone enviar equipos técnicos y humanos a más de 200 metros bajo el nivel del mar.
[Clearbot, el robot autónomo que elimina el plástico marino identificando la basura]
Aún así, hay quien está dispuesto a seguir innovando para poder hacer realidad el sueño de Julio Verne y sus 20.000 leguas de viaje submarino, como los investigadores de Stanford que están detrás de OceanOneK. Se trata de un robot de aspecto humanoide que cuenta con un sistema de retroalimentación háptica (basada en el tacto) para que la persona que lo controla desde tierra pueda sentir la resistencia del agua y los contornos de los artefactos encontrados en antiguos pecios.
Tras varias expediciones en el Mediterráneo, que empezaron a realizarse en septiembre tras años de pruebas y cambios en el diseño, hace solo unos días los responsables de este ingenio mecánico encontraron el casco del barco de vapor italiano Francesco Crispi a unos 500 metros bajo la superficie del mar.
"Te acercas mucho a esta increíble estructura y cuando la tocas ocurre algo increíble: la sientes de verdad", aseguró en un comunicado de prensa Oussama Khatib, director del Laboratorio de Robótica de la Universidad de Stanford. "Nunca había experimentado algo así en mi vida. Puedo decir que fui yo quien tocó el Crispi a 500 metros. Y lo hice: lo toqué, lo sentí".
Tesoros hundidos
Lo que empezó en 2016 como un proyecto para estudiar los arrecifes de coral del Mar Rojo a profundidades superiores a las habituales para los buceadores, se ha convertido en una de las iniciativas más ambiciosas a nivel internacional para explorar los fondos marinos. La idea, crear un instrumento robótico que se acercara lo más posible a un buceador humano, finalmente, se ha llevado a cabo integrando ojos con visión 3D para captar el mundo submarino a todo color, inteligencia artificial, robótica avanzada y retroalimentación háptica.
El robot OceanOneK diseñado por investigadores de Stanford
El robot mide aproximadamente 1,5 metros de largo y su inteligencia artificial está diseñada para poder discernir el cuidado con el que debe manipular un objeto sin romperlo. Tiene dos modos de funcionamiento: controlado por un operador humano a distancia o 'bucear' de forma autónoma gracias a sus sensores y algoritmos, que le permiten evitar colisiones y buscar objetivos.
En la parte trasera, muy abultada, OceanOneK cuenta con ocho propulsores multidireccionales para poder maniobrar cuidadosamente bajo el agua. Gracias a ellos, la primera versión del robot exploró en 2016 el buque insignia del rey Luis XIV, La Lune, naufragado en 1664. Lo hizo a 100 metros de profundidad y a 32 kilómetros del sur de Francia, pero Khatib y su equipo querían seguir descendiendo para poner a prueba su invento.

Oussama Khatib controlando el robot OceanOneK a distancia Omicrono
Si el robot original se diseñó para alcanzar profundidades máximas de 200 metros, los investigadores querían forzar los límites y llegar a los 1.000 metros. Para ello, el equipo modificó el cuerpo del robot utilizando una espuma especial con microesferas de vidrio que aumentan la flotabilidad y permiten combatir la presión que sufre el robot a esa profundidad, más de 100 veces la que experimentan los humanos a nivel del mar.
Además, los investigadores mejoraron los brazos del robot con un mecanismo de aceite y resortes que lo comprimen para igualar la presión exterior, amortiguando el daño que podrían sufrir los componentes electrónicos cuando OceanOneK desciende a las profundidades del océano. También se actualizaron muchos componentes para minimizar la cantidad de aire en el interior del robot. Otras mejoras adicionales afectan al movimiento de la cabeza y los brazos, así como dos nuevos tipos de manos para poder manipular distintos tipos de objetos.
Más expediciones
Aunque el reto al que se enfrentan los investigadores de Stanford es complejo y no ha estado exento de obstáculos, las misiones han sido un éxito. Hasta la fecha, OceanOneK ha realizado inmersiones un avión Beechcraft Baron F-GDPV, el ya mencionado barco de vapor italiano Le Francesco Crispi, un barco romano del siglo II frente a las costas de Córcega, un avión P-38 Lightning de la Segunda Guerra Mundial y el submarino Le Protée, hundido tras chocar con una mina en 1943.
Más allá de estas primeras expediciones, lo que supone el proyecto es abrir nuevas oportunidades para las ciencias marinas y las actividades de ingeniería submarina, como la inspección y reparación de barcos e infraestructuras tan críticas como los pilares de los puentes y las tuberías y cables sumergidos.
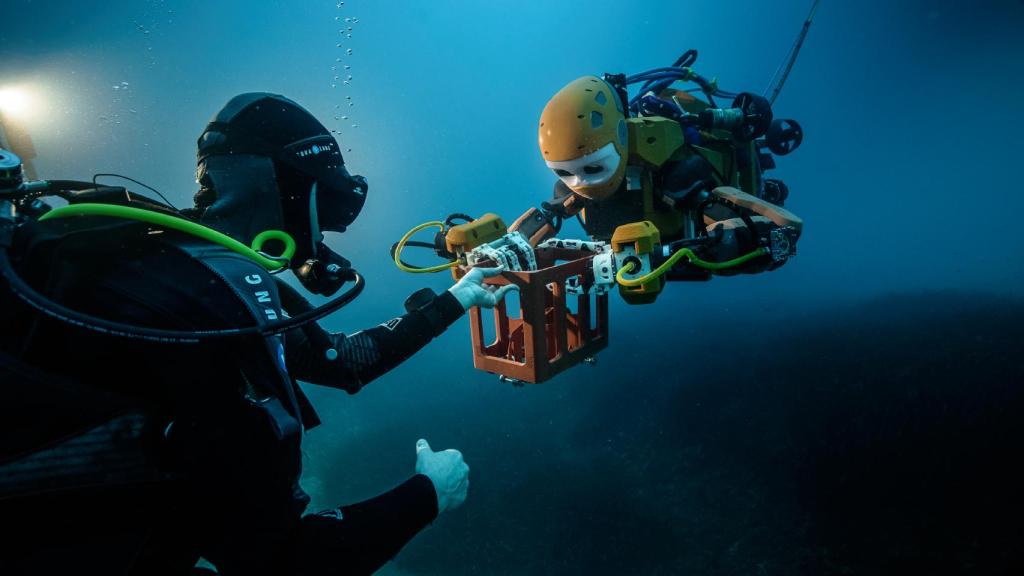
Un buzo trabajando con OceanOne, la versión preliminar del robot Omicrono
Los responsables del OceanOneK no se conforman con eso y ya tienen previstas otras expediciones en diversos lugares del mundo para encontrar ciudades perdidas enterradas en lagos profundos y pecios de importancia arqueológica hundidos a profundidades hasta ahora inalcanzables.
"Distanciar a los humanos físicamente de los espacios peligrosos e inalcanzables, al tiempo que se conectan sus habilidades, intuición y experiencia a la tarea, promete alterar fundamentalmente el trabajo a distancia", explicó Khatib en el comunicado de prensa. "Los avatares robóticos buscarán y adquirirán materiales, construirán infraestructuras y realizarán operaciones de prevención y recuperación de desastres, ya sea en las profundidades de los océanos y las minas, en las cimas de las montañas o en el espacio".
También le puede interesar:
- Así es GNOM, el robot que entrará en combate en Ucrania. ¿Terminator o Wall-E con metralleta?
- Probamos el perro robot de Xiaomi: te puede llevar la compra a casa pero también te da la patita
- Ben Goertzel, el matemático detrás de las robots humanoides más inquietantes y avanzadas
- La integración hombre-máquina, más cerca: un robot prueba tejido que se implantará en humanos



