
El robot Stickbug con sus seis brazos desplegados Omicrono
Así es Stickbug, el robot con seis brazos inspirado en las abejas que mejora la producción de los cultivos
Con seis brazos, este robot identifica las flores y las poliniza para sustituir a los insectos cuya desaparición está poniendo en riesgo la agricultura.
7 mayo, 2024 02:34La inteligencia artificial y la robótica también podrían 'quitarle' el trabajo a la abeja Maya, o más bien sustituirla cuando su especie ya no exista. El uso de la IA y los robots se ha planteado como un riesgo para miles de empleos, incluidos los agricultores de España, aunque también puede servir como solución ante un desastre natural que está haciendo peligrar la mayoría de cultivos y ecosistemas: la disminución de los insectos polinizadores.
La pérdida invisible de estos insectos amenaza a millones de personas y cultivos en todo el mundo. La destrucción de hábitats y el uso de pesticidas están provocando la pérdida de especies polinizadoras en todo el mundo. Y, aunque para los entomófobos (personas con fobia a los insectos) sea una buena noticia, su extinción supone perder el cultivo de frutas, verduras y frutos secos que dependen de su polinización.
El trabajo de abejas y abejorros es indispensable para sostener los ecosistemas, que a su vez aseguran la conservación del resto de especies. Pero en su lugar, la tecnología podrá suplantar esa labor vital. El robot Stickbug con sus seis brazos puede intentar más de 1,5 polinizaciones por minuto. Investigadores de la Universidad de West Virginia (EEUU) han publicado sus avances en un nuevo artículo científico prepublicado en el archivo online arXiv.
El robot Stickbug desarrollado por investigadores de la Universidad de West Virginia Omicrono
La robótica se inspira con frecuencia en los insectos para crear pequeños dispositivos voladores que se camuflan con la naturaleza y la analizan sin alterarla. Incluso, se trabaja en enjambres robóticos y drones que sirven para la construcción o la seguridad. Sin embargo, también hay una robótica no inspirada en los insectos, sino diseñada para sustituirlos. Es lo que representa, Stickbug, un robot con seis brazos que actúan de forma individual polinizando las plantas, con una tasa de éxito del 50%.
Identificando flores
Esta máquina nace como evolución del primer prototipo desarrollado por el mismo equipo hace años, el robot BrambleBee, que solo contaba con un brazo robótico. En 2018, cuando se presentó, esta máquina demostró ser capaz de realizar un exhaustivo análisis de la planta para abordar su polinización sin destruir las flores. Para ello utilizaba herramientas de percepción visual, planificación de rutas, control de movimiento y manipulación.
Robot Stickbug para polinizar
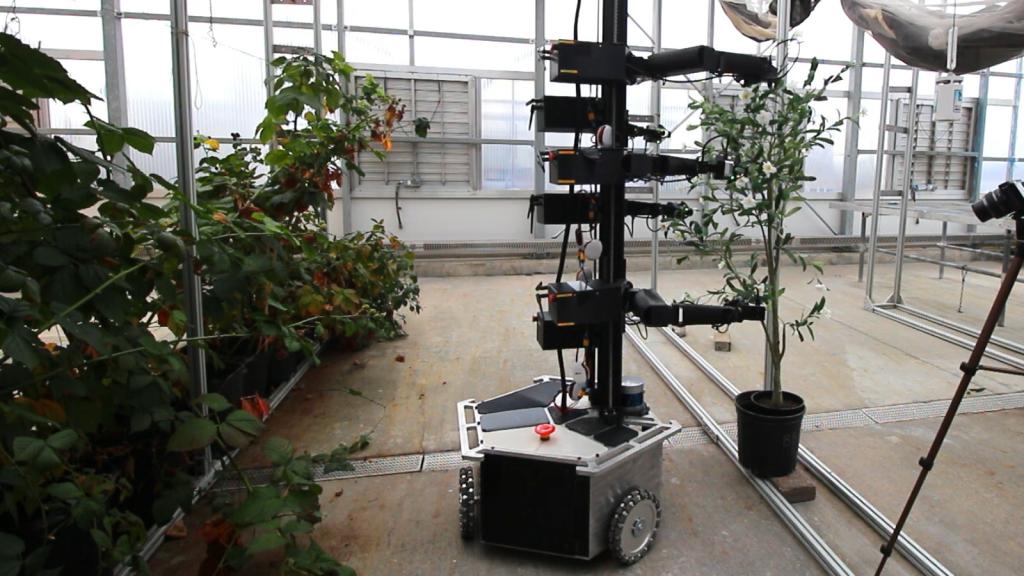
Dentro de un invernadero, el robot se desplaza entre pasillos de plantas de zarza, mora y frambuesa. Mediante una cámara a bordo, el sistema detecta los racimos de flores y genera un mapa virtual de su ubicación en cada fila de plantas. El robot reconoce las flores de mora utilizando una cámara de profundidad y un lidar RealSense D405. El algoritmo encargado de identificar las flores se ha compartido como código abierto entre la comunidad de desarrolladores.
Este mapeo sirve para que, en una segunda fase, el robot decida donde dirigirse para comenzar la polinización de forma ordenada y eficiente. Los investigadores se inspiraron en el comportamiento de las abejas, en particular las abejas albañiles, que recolectan polen para sus crías. Al igual que esta especie, el robot primero encuentra flores y luego realiza un seguimiento de su ubicación, utilizando esta información para planificar el mejor camino para llegar a ellas.
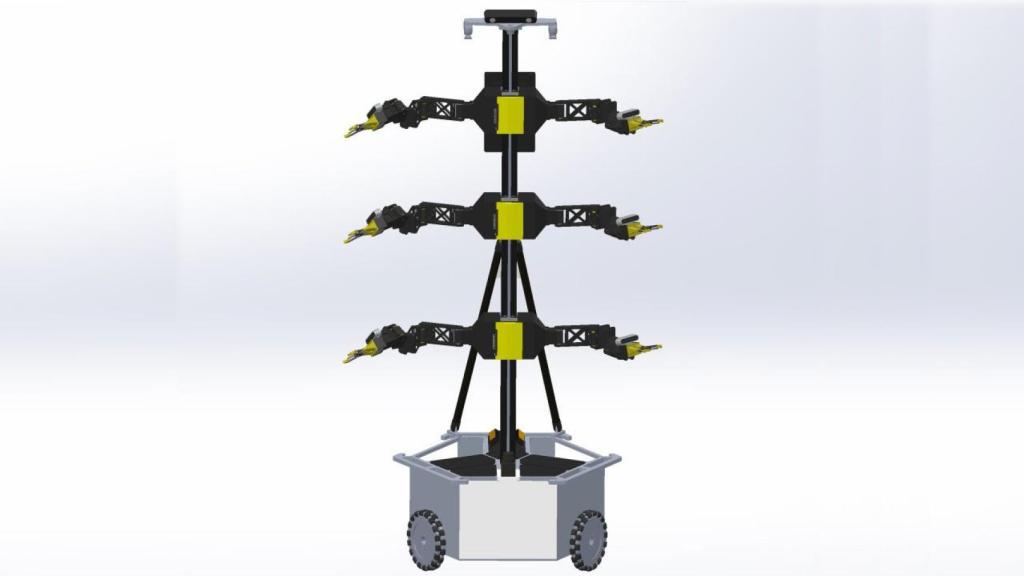
Diseño de robot polinizador Stickbug Omicrono
Según detallan en el artículo científico, el nuevo robot Stickbug utiliza "un impulsor Kiwi holonómico compacto" para recorrer con precisión las estrechas hileras del invernadero. También cuenta con un mástil alto que soporta los seis manipuladores, lo que facilita que estos brazos alcancen la altura máxima de las plantas.
La detección se realiza mediante un sistema de visión por ordenador y un Intel NUC con GPU Nvidia que evalúa las imágenes y controla los seis brazos del robot, cada uno de forma independiente. Además de sus herramientas de detección y clasificación de flores, el robot utiliza en último lugar una punta de fieltro que poliniza por contacto sin afectar a la integridad de las flores.
Su futuro en invernaderos
Para poner a prueba la capacidad polinizadora del robot, los investigadores no quisieron esperar a la primavera para ver florecer las plantas del invernadero, así que pusieron a Stickbug frente a una zarza artificial y cronometraron su trabajo.

Robot para polinizar de un brazo, Bramblebeean Omicrono
"La validación experimental inicial demuestra que Stickbug puede intentar más de 1,5 polinizaciones por minuto con una tasa de éxito del 50%", escribió el equipo de investigadores. "Además, se creó un conjunto de datos de percepción de flores de BrambleBee y está disponible públicamente junto con el software y los archivos de diseño de Stickbug".
Tras esta prueba en un entorno controlado, el equipo de investigación pretende llevar al robot a un ambiente más natural. "En el futuro se realizarán experimentos en plantas vivas durante la temporada de floración y mejorará la reidentificación a través de la Intersección sobre la Unión (IoU) y el mapeo basado en gráficos relativos a las flores", señalan sus responsables. También esperan mejorar la búsqueda de flores en regiones y lugares inexplorados.

Stickbug, robot para polinizar Omicrono
Esta ingeniosa máquina se une a toda una serie de robots y sistemas inteligentes que están revolucionando la agricultura. Así se desarrollan cultivos más tecnológicos, donde los humanos se sirven de estas máquinas para controlar mejor sus plantaciones, utilizar de forma más efectiva los recursos y luchar contra el impacto del cambio climático.





