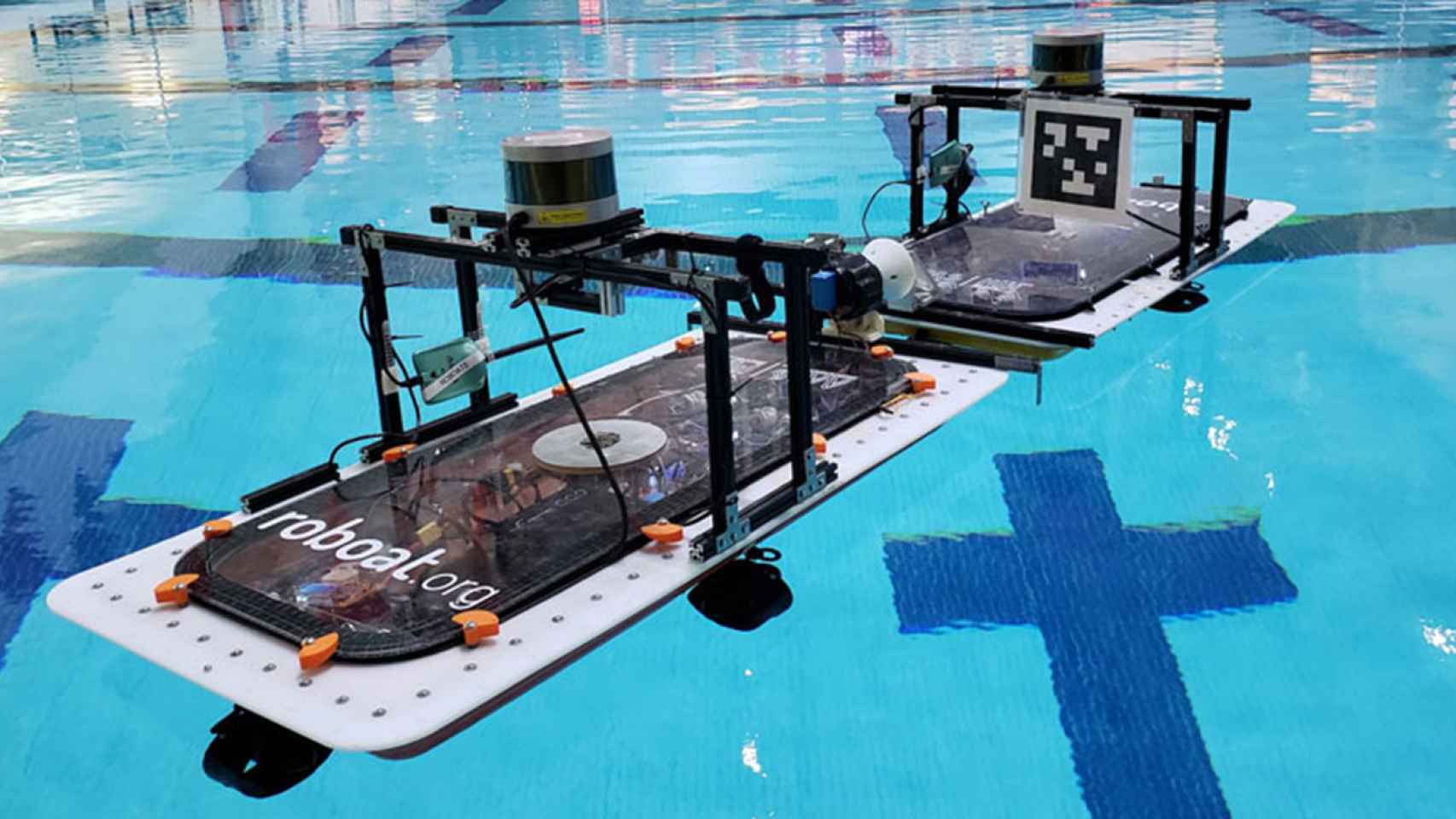
Uno de los prototipos del equipo de investigación del MIT.
Investigación
El MIT desarrolla barcos autónomos para recolectar basura del agua
Esta particular flota de barcos robóticos autónomos se están probando en los canales de Ámsterdam para promover la movilidad inteligente
6 junio, 2019 14:58Por las calles aún no circulan los coches autónomos, pero un equipo de investigadores del MIT ya está desarrollando una flota de barcos autónomos y robóticos para navegar por los canales de Ámsterdam, con el objetivo de proporcionar transporte en las vías fluviales, recoger basura del agua e, incluso, autoensamblarse para crear estructuras "emergentes", como puentes peatonales o embarcaderos que faciliten una movilidad intelitenge por la ciudad.
Se trata del proyecto Roboat, que pretende construir esta particular flota de barcos con cascos rectangulares equipados con sensores, propulsores, microcontroladores, módulos GPS, cámaras y otros dispositivos que ofrecen movilidad inteligente en el agua para aliviar la congestión en los concurridos canales de la capital holandesa. Las unidades roboat podrían utilizarse, además, como sensores ágiles para recopilar datos sobre las infraestructuras de la ciudad, sobre la calidad del aire y el agua, entre otras informaciones.
Las estructuras que se forman con estos barcos robóticos podrían desmontarse automáticamente en tiempos establecidos y reformulares en otro tipo de estructuras para cubrir diferentes necesidades. En un documento presentado en la Conferencia Internacional sobre Robótica y Automatización, los investigadores subrayan que sus barcos "pueden identificar y conectarse a las estaciones de acoplamiento".
Esto es posible gracias a los algoritmos de control que guían los roboats a su objetivo, donde "se conectan automáticamente a un mecanismo de cierre personalizado con una precisión milimétrica". Si el barco robótico perdiera la conexión, se realizaría una copia de seguridad y volvería a intentar conectarse, explican en este paper.
Este sistema autónomo podría ser especialmente útil en Ámsterdam, por ejemplo, para la recolección de basura durante la noche, ya que los roboats podrían navegar alrededor de un canal, ubicarse y sujetarse a plataformas que sostienen contenedores de basura, y transportarlos de regreso a las instalaciones.




